BEFORE YOU
DESIGN VERIFY
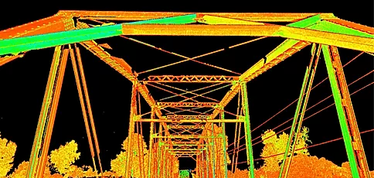
Simply put, we measure built structures, very accurately, in a short period of time and deliver 3D digital blueprints.

Precision and Accuracy
Use our 2D or 3D digital maps and models – accurate to within millimeters – to survey and measure from your desktop

Fast Delivery
Get your measured 2D and 3D models fast so you can keep your project schedules.
Reduce Costs
Avoid the cost of clashes, change orders, equipment rentals, and the project delays that come with them.
Experienced 3D Scanning Professionals
Verify 3D offers 3D laser scanning services with 3D CAD and BIM modeling, utilizing the necessary tools, and expertise, needed to help streamline your renovation and construction projects.
Simply put, we measure "As Built" structures and deliver very accurate 3D digital blueprints safely and quickly.
Verify 3D maintains MSHA certification to work in surface and underground mines. We have extensive experience scanning and modeling mine shafts, tunnels and mining facilities.
Working with professionals from Architects, Engineers, General Contractors and Geologists to Visual Media Producers, Archeologists, Insurance Companies and even Forensic Scientists.
We service many industries including Heavy industries such as Oil and Gas, Power Generation, Power Distribution, Ship Building, Car Manufacturing and Mining.


GOT A QUESTION? ASK A 3D EXPERT.
Do you have a question about using 3D in your project?
No problem. Share a few details, and we'll get you an answer right away.
3D SOLUTIONS FOR YOUR INDUSTRY.

Mining

Power and Utilities

Construction

Oil and Gas

Hospitals

Civil Engineering